|
I am a fifth year graduate student in the University of Texas at Austin, pursuing PhD in ECE. I am advised by Prof. Sandeep Chinchali. My research focuses on synthetic time-series data generation using diffusion-based multimodal models, and on improving forecasting by incorporating exogenous signals such as news and social media. Previously, I was a Research Assistant at Robotics Research Centre, IIIT, Hyderabad, working under Madhava Krishna. I received my undergraduate degree in Electrical Engineering at Anna University in India, with my Bachelor's thesis advised by Ranganath Muthu. My Research Internship at IIT Madras, with P.V.Manivannan, was focussed on SLAM. I have also worked full-time for over a year at Swaayatt Robots. |

|
|
|
|
|
|
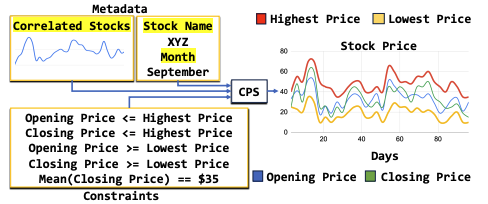
Sai Shankar Narasimhan, Shubhankar Agarwal, Litu Rout, Sanjay Shakkottai, Sandeep Chinchali NeurIPS 2025 paper We propose Constrained Posterior Sampling (CPS), a principled framework for generating realistic synthetic time series data that provably satisfies user-specified hard constraints such as physics laws and operational limits. |
|
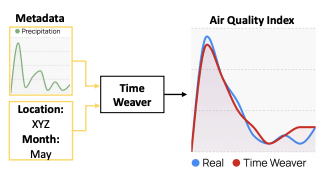
Sai Shankar Narasimhan, Shubhankar Agarwal, Oguzhan Akcin, Sujay Sanghavi, Sandeep Chinchali ICML 2024 (Spotlight) paper We present Time Weaver, a novel diffusion-based model for conditional time series generation that can generate realistic synthetic time series data conditioned on scenario-specific descriptions and metadata. |
|
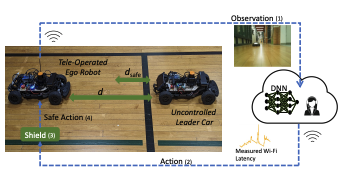
Sai Shankar Narasimhan, Sharachchandra Bhat, Sandeep Chinchali IEEE Robotics and Automation Letters (RA-L) 2024 | ICRA 2024 (Oral) paper We propose a principled framework for safe networked control of robotic systems using probabilistic verification to provide safety guarantees under network impairments such as delays and packet losses. |

|
Kaustubh Mani*, N. Sai Shankar*, Krishna Murthy, K. Madhava Krishna, IROS 2020 Also presented in PAD Workshop, ECCV 2020 workshop page | project page | paper We introduce AutoLay, a new dataset for amodal layout estimation in bird’s eye view. Further, we propose VideoLayout, a real-time neural net architecture that leverages temporal information from monocular video, to produce more accurate and consistent layouts. |
|
Kaustubh Mani, Swapnil Daga, Shubhika Garg, N. Sai Shankar, J. Krishna Murthy, K. Madhava Krishna, WACV 2020 project page | paper | code | video We present MonoLayout, a deep neural network for real-time amodal scene layout estimation from a single image. We leverage adversarial feature learning to hallucinate plausible completions for occlusions. |
|
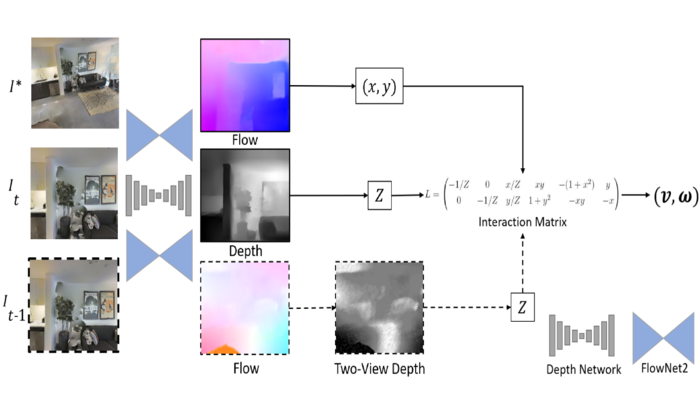
Y V S Harish, Harit Pandya, Ayush Gaud, Shreya Terupally, Sai Shankar, K. Madhava Krishna, ICRA 2020 project page | paper | code We propose a novel system consisting of deep neural networks that systematically integrates depth cues with flow features. |
|
Ramanan Sekar, Sai Shankar N, Shiva Shankar B, P.V.Manivannan, International Conference on Computational Intelligence 2018 conference | paper | code We propose a novel Kalman Filter (KF) algorithm, that leverages the statistical correlation between the measured variables. |
|
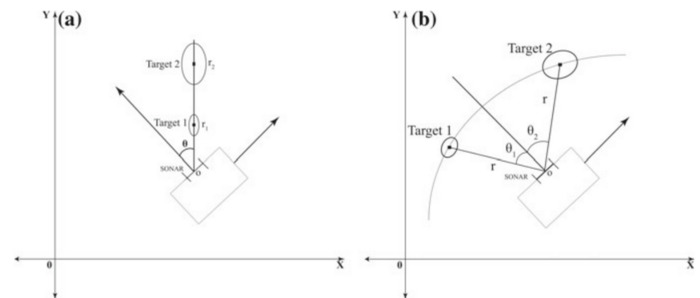
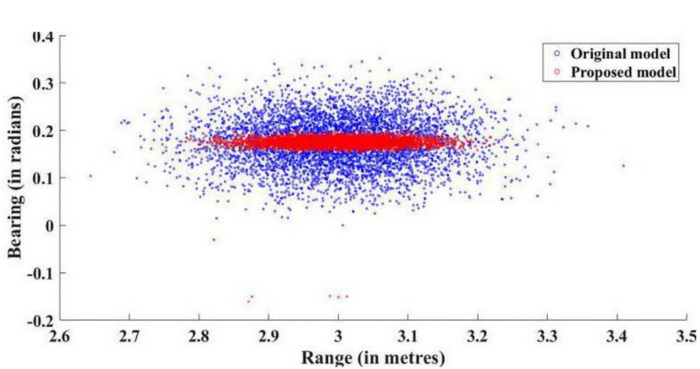
Ramanan Sekar, Sai Shankar N, Shiva Shankar B, P.V.Manivannan, International Conference on Computational Intelligence 2018 conference | paper We propose a solution to reduce the range and bearing error in SONARs significantly. Using the results from the Gaussian Correlation Inequality, we derive probabilistic transformations that can improve the measurements of the SONAR, thus reducing the sensor error. |

|
Ramanan Sekar, Sai Shankar N, Shiva Shankar B, Undergraduate Final Year Project Supervised by Ranganath Muthu report | presentation We developed a collaborative Aerial Vehicle (UAV), Ground Vehicle (UGV) platform that can be used to aid / automate search and rescue missions in disaster zones. |